Steve Cheney
Personality
Social Media
Steve Cheney
Personality
Social Media
Search
Personality
Social Media
Personality
Jason Weaver Net Worth: How Rich Is The Lion King Talent?
Personality
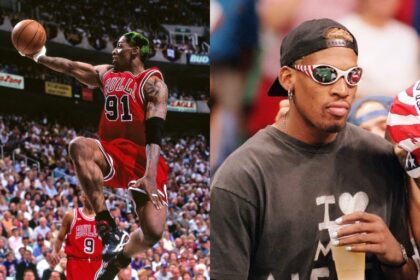
Dennis Rodman’s Net Worth: The Heartbreaking Truth
Personality
Meet the Famous YouTuber: How Old is Duke Dennis?
Personality
Danica Patrick’s Height: Everything You Need to Know
Personality
Who Is the Asher House Girlfriend? A Behind the Scenes Look
Personality
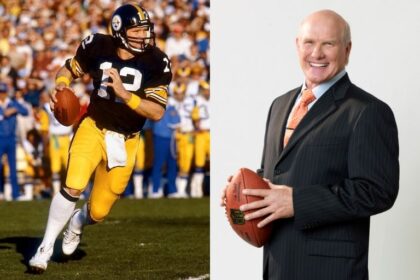
Terry Bradshaw Net Worth: Unraveling the Total Wealth of an NFL Legend
Personality
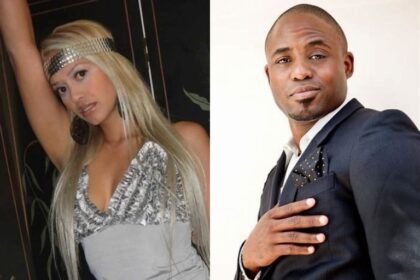
Diana Lasso: Colombian-Born American, Wayne Brady’s First Wife, New Year’s Eve Wedding, Marriage of Just 2 Years
Personality
Kristin Grannis: Jamie Foxx’s Ex-Girlfriend,Mother to His Youngest Daughter, Anelise Bishop
Personality
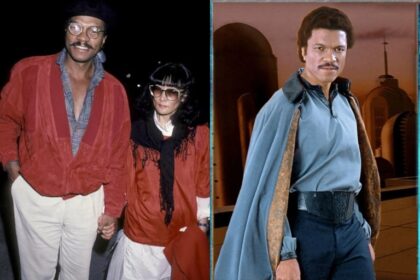
Teruko Nakagami: Japanese-American, Wayne Shorter’s Ex-Wife, Now Over 50 Years as Billy Dee Williams’ Wife
Personality
How Old Is Trey Makai? Exploring the Age of a Digital Celebrity with Millions on TikTok and YouTube
Personality
Malika Andrews’s Husband: Is the NBA Today Host Married, Dating, or Single?
Personality
Top 15 Handsome Black Actors with Blue Eyes
Previous
Next
Welcome Back!
Sign in to your account
Username or Email Address
Password
Remember Me